UNEXMIN all over Europe thanks to Euronews
Euronews, the multilingual television network, presents next week a news piece about the UNEXMIN project on their science-oriented program Futuris.
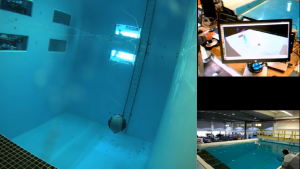
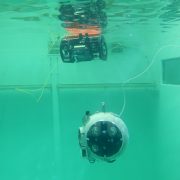
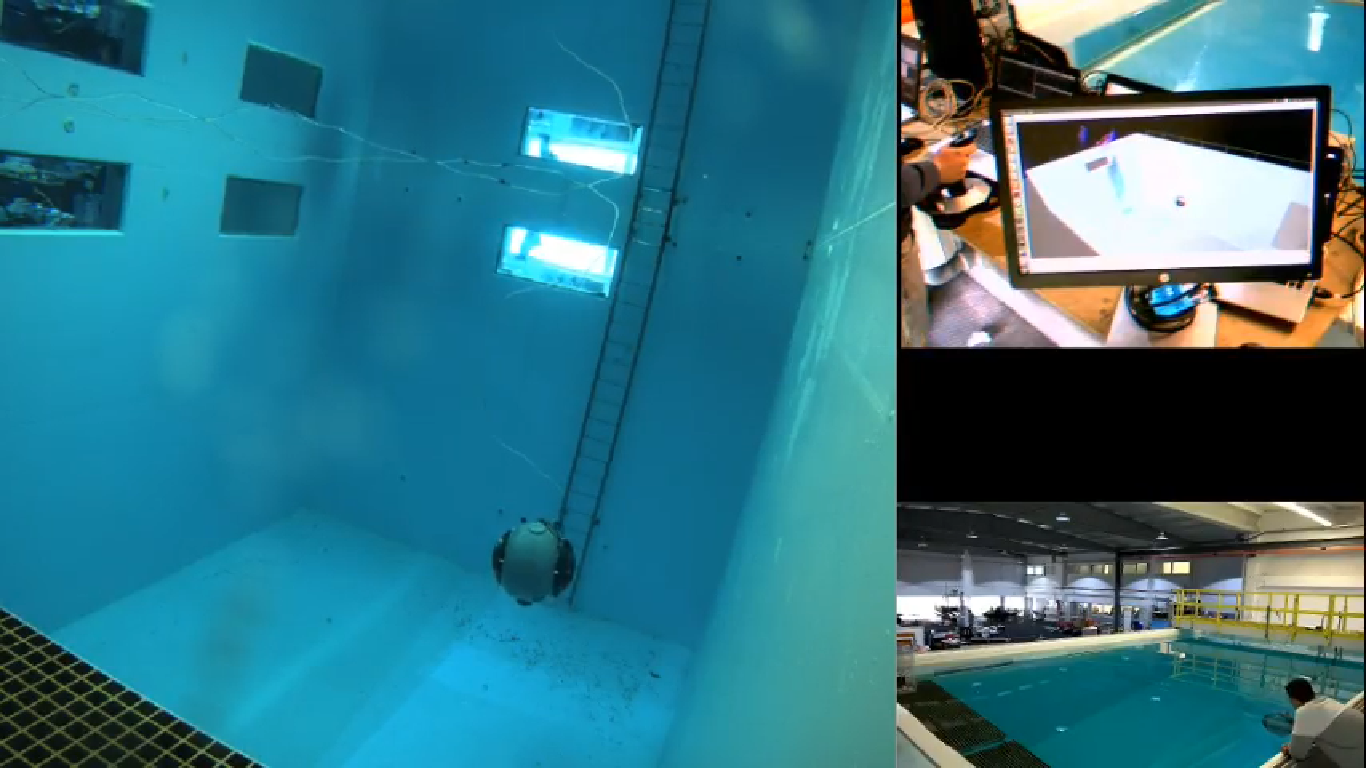
The news item will be based on the most recent trials held at the Kaatiala mine and includes general information and interviews about this EU-funded Horizon 2020 project. The UNEXMIN project is developing and testing an innovative robotic solution to explore and map flooded underground mines.
The Euronews story about UNEXMIN will air during next week, from Monday to Sunday, approximatelly at the following times (Central European Time):
Monday 02/07: 18:45, 01:45
Tuesday 03/07: 13:15, 18:15, 01:45
Wednesday 04/07: 10:15, 16:45, 02:45
Thursday 05/07: 14:15, 17:15, 01:45
Friday 06/07: 11:45, 15:45
Saturday 07/07: 06:45, 12:15, 17:45, 22:15
Sunday 08/07: 10:45, 14:15, 20:45
After the television broadcasting times, the Futuris program featuring the UNEXMIN news will be available in all the 12 languages of the website: http://www.euronews.com/programs/futuris/. Then, a few days later, the UNEXMIN story will also be available on Euronews’ YouTube channels – just search for UNEXMIN!