Challenges make us stronger
The UX-1 explorer employs a wide range of robotics technologies and cutting-edge know-how from deep sea underwater robotic systems, 3D map reconstruction, control and navigation, autonomy and other areas of interest. The technologies are adapted and tested in laboratory conditions, similar to those found in flooded mines, integrating imaging and other non-invasive surveying technologies, before the deployment of the system in the real-life environment of underground flooded mines. Recent adavances in autonomy research allow the design and development of this new class of mine explorer service robots, capable of operating in real mine conditions without remote control – such robots do not exist nowadays – UX-1 is the first of its kind!
The deployment of a multi-robotic system in a confined environment, such as a flooded mine, poses a lot of challenges that must be overcome so that the robots can work autonomously in such spaces, without damaging the equipment and the mine itself.
To address major challenges UNEXMIN brings together research teams covering deep sea robotics, autonomy research, mineral exploration and development of miniaturized scientific instruments to create this very specific technology, in a strong collaborative way. By doing this, UNEXMIN opens long-term cooperation possibilities between Europe’s Raw Materials and Robotic Technology provider sectors: this can lead to a reduction in high costs for exploration and to the development of science and technology, one of the EU’s main goals.
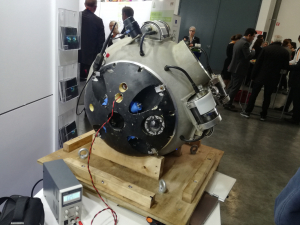
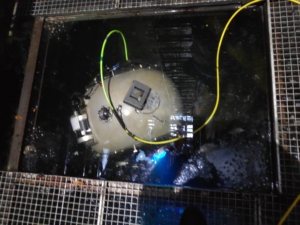
The construction of the first prototype – ready in April 2018 – was preceded with component validation and simulations, to understand the behavior of all the technology components and instruments on the application environment. Post-processing and data analysis tools were paralelly developed and are constantly improved. Pre-operational trials in four flooded mines across Europe will prove the technology.
The robot’s development process is spiralling with continuous upgrades that are implemented in parallel with more and more with the complex field pilots. This demonstrates the Platform’s scalability from small missions to larger ones by increasing the number of deployed autonomous drones, and supporting multi-robot cooperation in confined 3D spaces with real-time sensor and data fusion for reliable navigation and communication.

Explorer structural design for robustness and resilience
Physical robustness and self-diagnosis capabilities of UX-1 assure that it performs its tasks reliably and safely. The robot needs to fit into small mine openings and to resist high pressures when operating down to a certain depth. The structure of the robotic system enables it to avoid being trapped in narrow dead-ends, to avoid equipment damage and therefore, possible system failures.