
UNEXMIN at Tampere Workshop
From the 24th to the 26th of May, UNEXMIN partners held a meeting in Tampere, Finland. The meeting, entitled “End-user requirement specification workshop”, aimed to define and specify the technical features of the autonomous multi-robotic explorer in order to best serve end-users who will enlist UX-1’s services in the future.
Discussions included everything from the robot’s size, weight, shape, its autonomy, navigation, survivability under harsh conditions such as underground mines, to the instruments it will carry for geological data collection and post-processing on its future missions.
During this meeting, six workshops were attended by the consortium members in order to discuss and decide the best solutions for the robot’s developments and construction. These workshops were:
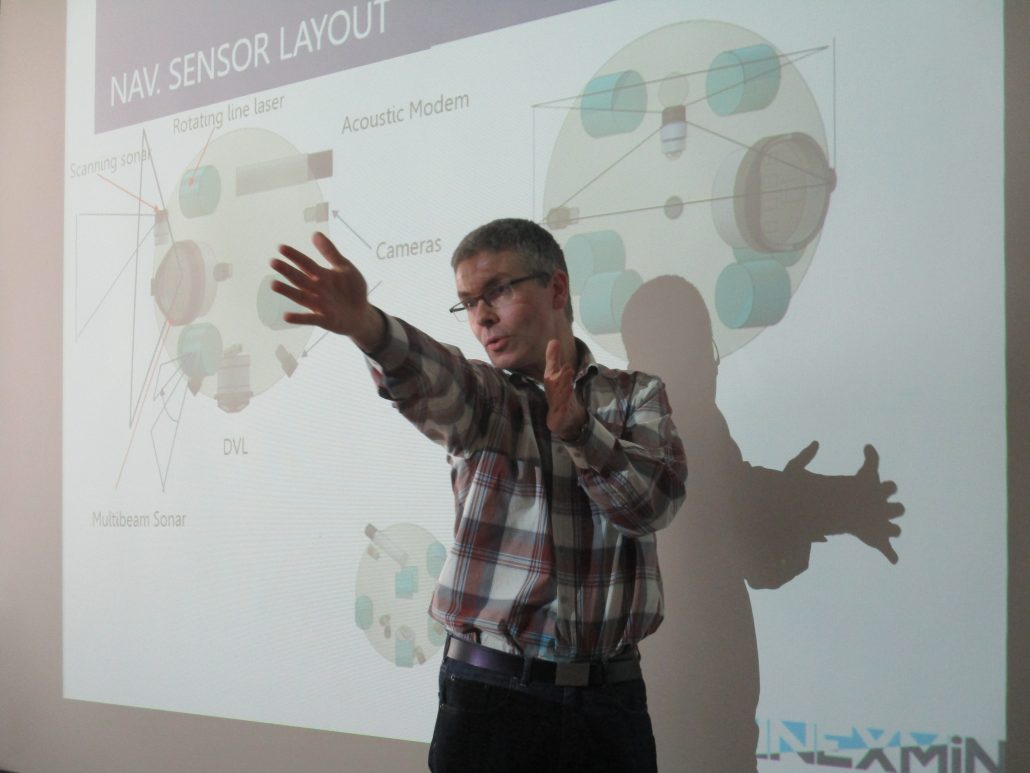
Interactive discussion on one of the workshops
- Design requirement and environmental consideration
- Navigation and tracking (including vision sensor configuration)
- Structural layout and safety/survivability considerations
- Structural and subsystems design
- Essential means for successful geological data collection
- Data processing and post-processing
Every topic of great importance for the project’s development was discussed in these workshops, so everything was covered to ensure things are going in the right direction.
On the last day, the consortium members visited a Sandvik Mining and Construction test mine in which drilling tests and monitoring are performed autonomously, similar to one of the technologies UNEXMIN is adapting and developing during the project lifetime. There was also a tour of the TUT laboratories, where the robot’s hull will be constructed.

One of the many laboratories in TUT – Tampere University of Technology.
This meeting allowed the UNEXMIN group to define a specific strategy for the robot’s developments, taking into account different factors such as end-user requirements, materials and instruments availability and navigation, autonomy and survivability constraints. In the end, it was a productive and enjoyable meeting which will get us closer to the final objective of creating an autonomous multi-robot platform!

UNEXMIN members visiting the Sandvik Mining and Construction test mine
