Summary of the second week of the Kaatiala trials
The first field trials with the UX-1 robot are finished. The two-weeks trial ended on the 22nd of June with the robot’s capabilities being extensively tested on a real-life environment: a flooded mine. After the summary of the first working week at the Kaatiala mine site, the remarks of the second week are finally here. Read all about it below, alongside with some nice footage from the work done over the last working week!
On the 16th, the UNEXMIN team had to move its camp and respective working station to the northern part of the Kaatiala lake where the waters go deeper. It is at this site that the entrances to the underground flooded workings – perfect to test the UX-1 robot – could be found.
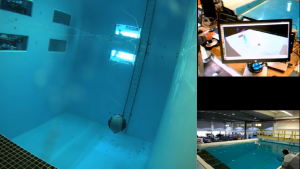
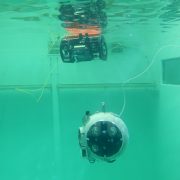
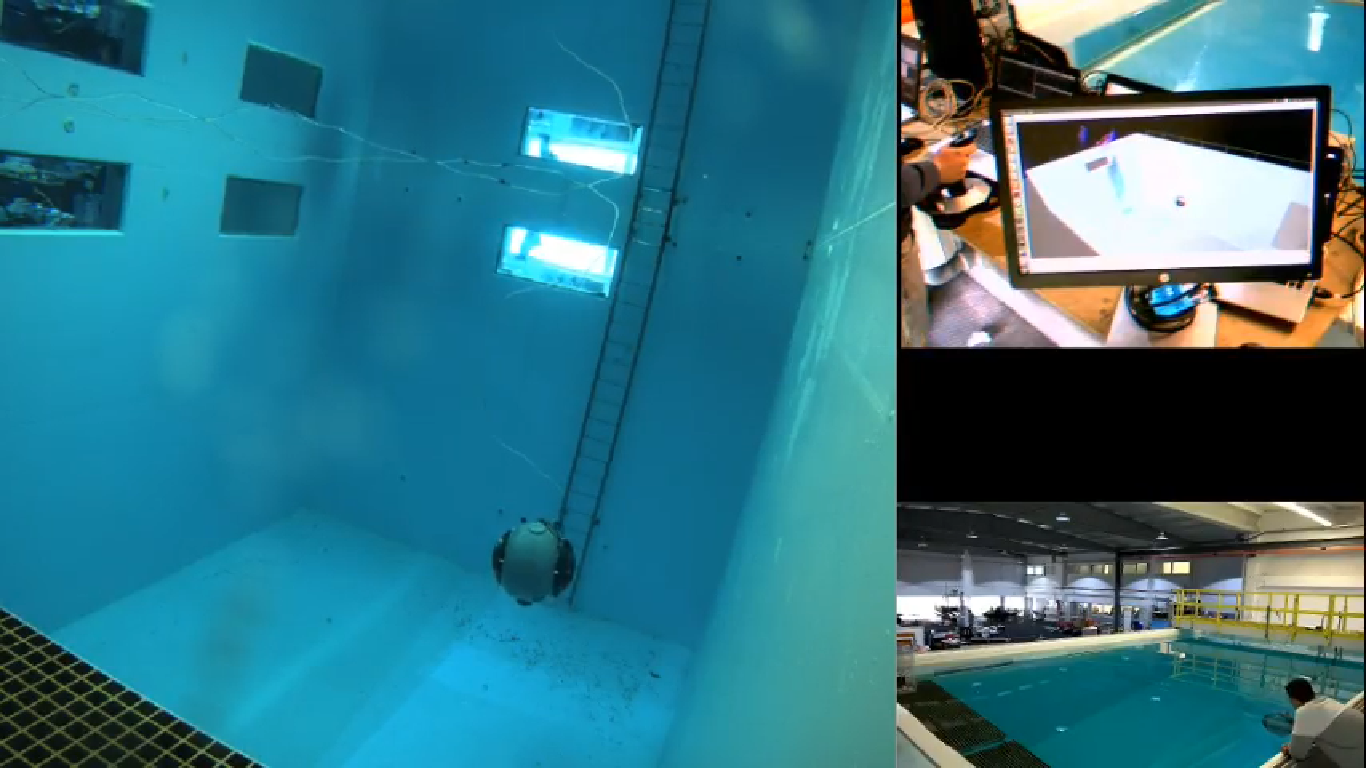
Then, with everything set-up accordingly, the researchers passed the next three days doing multiple dives with the robot, where UX-1 entered and navigated the underground tunnels. Divers previously placed calibration objects in the tunnels to help with testing UX-1 capabilities: navigation, movement, control, mapping, amonst others.
The tests allowed the UNEXMIN team to test different navigation sensors such as UV and SLS imaging units, multispectral camera, acoustic cameras and laser scanners. These instruments are essential to gather spatial and geoscientific data. The robot’s movement and control was tested by making it pass through the underground tunnels that included a always hazardous junction (hazardous for an automated system such as UX-1!). The robot was successfully tested a couple of times in this environment, before the week was over and the team had to pack everything and leave.








The success of the Kaatiala trials is evident. The UNEXMIN team is confident in further developing the technology and to optimize it. And that is the next step in the robotic platform development: to use the data acquired from this trial and improve the robot’s capabilities for the next trial at the Idrija mercury mine in Slovenia, in September!