
Interview with Tatjana Dizdarevic from CUDHg
“The material will be used for presentation of a kind of cultural heritage that could not ever be seen by human again, if the UNEXMIN technology did not exist.”
The second field trials with the robotic technology developed by the UNEXMIN project are over. During two weeks the UNEXMIN teams have been in Idrija, Slovenia, at the Idrija mercury mine to test the capabilities of the UX-1 robot and to obtain data from the flooded mine that would be impossible to get otherwise. Tatjana Dizdarevic, from CUDHg, the public institution owning the mine rights, talks about the experience of having the UX-1 robot surveying the flooded part of Idrija mine and what benefits does it bring to the future of the Idrija mercury mine, an UNESCO World Heritage site.
Luís Lopes, LPRC: Do you feel the trial at Idrija was a success? Why?
Tatjana Dizdarevic: The Idrija trials were a success. The robot was tested in very difficult conditions; the transport from the surface to the water level in the shaft was a challenge for the Idrija miner’s crew, but the robot also did an autonomous dive for the first time during these trials. The multispectral camera for recognizing minerals was successfully tested in the shaft’s water.
As for navigation within the flooded mine, the UX-1a robot dived to the maximum depth of 26,2m of the main shaft. Descent into depth lasted for 1,5 hours and rise from the depth lasted 0,30 hour. The most challenging at that exercise was the possibility of stacking the robot to the submerged objects (wires, columns, etc.).
LL: What data did you get and how will it be used?
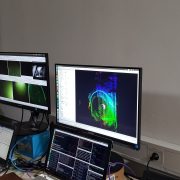
TD: A three-dimensional model of the flooded main Borba shaft in a depth of 190m and another one from the open gallery on the 9th level in a depth of 220m with the obstacles found in it. The material will be used for presentation of a kind of cultural heritage that could not ever be seen by human again, if the UNEXMIN technology did not exist.

“The most challenging at that exercise was the possibility of stacking the robot to the submerged objects (wires, columns, etc.).
“The most challenging at that exercise was the possibility of stacking the robot to the submerged objects (wires, columns, etc.).
“…the robot also did an autonomous dive for the first time during these trials
“…the robot also did an autonomous dive for the first time during these trials
LL: Are you happy with the results?
TD: At CUDHg Idrija we are very happy with the results! Everythin went as planned. It is now time for the UNEXMIN team to process the data from the dives and wait until we get the final material that we can share with the public that visits the mine.
LL: Were you positively/negatively surprised with something in particular?
TD: Only positively: The work within the project group and the Idrija miners was very positive and friendly. The whole group worked as one. There were no negative effects and happenings during the transport of the robot from the surface to the IX level and vice versa.
LL: What do you think was the most positive point/achievement?
TD: The autonomous dive for the first time of the project!
Do you have any specific questions you would like to have answered? Just write them in the comments!
















")
_robot reached the bottom of the shaft 25.8 m deep and discovered an open gallerie")






