UNEXMIN meeting in La Palma: UX-1 and field trials in the agenda
The UNEXMIN partners got together in the island of La Palma in the Canary Islands, Spain, to discuss and better prepare the last year of the UNEXMIN project, that will officially end on the 31st October. The two-day meeting (10 and 11 of January) aimed at providing a place to discuss the present and future development of the project. The field trials and the production of the remaining two UX-1 robots were at the core of the agenda.
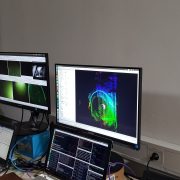
The above-mentioned points were largely introduced and discussed during the first day. The UNEXMIN project already underwent through two field trials (Kaatiala and Idrija) and results from the surveying of these mines is currently in development. The experience gained on both trials will allow the team to properly prepare for the surveys on the Urgeiriça (Portugal) and Ecton (UK) mines, where two and three robots will be used, respectivelly.
The production and assembly schedule of the next two UX-1 robots was also outlined in order to avoid any delays, that might hinder the project development. This was agreed by all partners that are involved in the construction of the robotic platform and work will follow inline with planned.
During the second day, and with the main issues to be discussed out of the way, the UNEXMIN partners had a more relaxing meeting. The future of UNEXMIN was discussed (next steps, what about the future, etc) and a mindmapping exercise, that will help to shape the future of UNEXMIN, was organised.
Now it is time to continue working in order to reach the UNEXMIN project’s objectives!

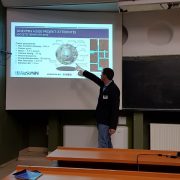
The UNEXMIN meeting in La Palma, January 2019 
Mindmapping exercise 
UNEXMIN group photo