UNEXMIN and ¡VAMOS! – two EU-funded projects – will be co-organizing a joint conference in January 2018. The most recent circular about the conference has been now launched!
The joint UNEXMIN-¡VAMOS! conference, entitled “Use of Robotics and automation for mineral prospecting and extraction” aims to bring together experts from minerals exploration and mining and from the robotics fields to discuss about the latest advances in the respective fields and rise synergies on innovation in mineral prospecting and extraction.
The one-day forum will start with an introductory plenary, followed by parallel sessions focused on presentations and further discussions about the projects. In the afternoon, workshops related to technology roadmapping and exploitation are envisaged, being part of UNEXMIN and ¡VAMOS! activities. The conference also ultimately aims to develop networking experiences and establishing new cooperation links between different partners and perspectives.
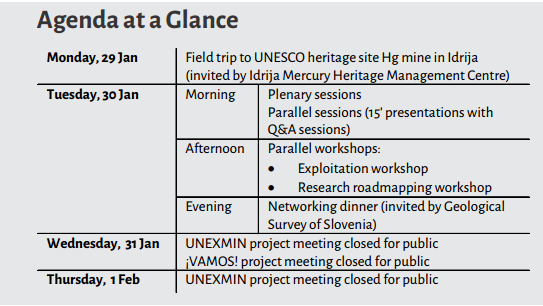
Overall agenda for the conference
All interested people from the fields of geology, mining, robotics, machinery, minerals industry representatives, mining and construction machinery manufacturers, robotics developers and manufacturers and policy and decision makers in the field of mineral exploration and extraction are invited to attend. This conference will be organized by the Geological Survey of Slovenia, partner in both UNEXMIN and ¡VAMOS! projects, in Bled, Slovenia, on the 30th of January 2018. Besides the core conference, it is also possible – and advisable! – to join a one day pre-conference field trip to the Idrija mercury mine – one of the test sites where the UX-1 robot will be tested.
For more information, please check the conference flyer.

Idrija Mercury Mine (Credit: Arne Hodalič)

Francis’ Shaft (Credit: Matej Peternelj)
Relevant data about the conference is also mentioned below:
Date and Venue
The conference will be held on 30 January 2018 in Hotel Kompas, Bled. Bled town is situated in an alpine landscape of the NW Slovenia and is a popular tourist destination. The town is 35 km from Ljubljana International Airport and 55 km from the capital city, Ljubljana.
Registration
Please register via email (manja.zebre[at]geo-zs.si) by 8 January 2018.
Required registration data:
Name and surname,
– Institution,
– Title of the presentation (optional),
– Up to 600-word (one page) abstract with one image (optional),
– Attendance to networking dinner,
– Possible special dietary requirements,
– Attendance to pre-conference field trip to Idrija.
Registration is free-of-charge. Individual invitations letters can be prepared if needed.
Important Dates
Registration deadline: 8 January 2018
Final conference program: 20 January 2018
Field trip to Idrija: 29 January 2018
Conference: 30 January 2018
Contact information
Local organisers:
Gorazd Žibret (general info), gorazd.zibret[at]geo-zs.si
Manja Žebre (registration), manja.zebre[at]geo-zs.si
UNEXMIN project coordinator:
Norbert Zajzon, nzajzon[at]uni-miskolc.hu
iVAMOS! project coordinator and technical management:
Jenny Rainbird, jenny.rainbird[at]bmtglobal.com
Stef Kapusniak, stef.kapusniak[at]smd.co.uk
More information
Second Circular